 齿轮系常用术语(二) 齿轮系常用术语(二)
2K-H型齿轮系
两个中心齿轮(K),一个行星架(H)为基本构件的行星齿轮系称2K-H型齿轮系。有单级、两级和多级之分,按其转化机构可分为负号机构和正号机构两种。它是型式最多,用途最广的行星齿轮系。
由太阳齿轮、内齿圈、行星架为三个基本构件的2K-H型齿轮系(负号机构),具有传动效率高、承载能力大、传递功率范围大,结构简单工艺性好等优点。由两个内齿圈、一个行星架或两个太阳轮、一个行星架为三个基本构的2K-H型齿轮系(正号机构),其啮合特点和结构特点都比前者(负号机构)稍有逊色。
NGW型齿轮系
 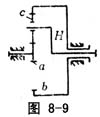 以行星齿轮系中,齿轮副类型命名(用符号表示)的2K-H型齿轮系(图8-9)。由内齿圈b、太阳齿轮a、公用行星齿轮c及行星架H组成的单级行星齿轮系(图8-3)。属于负号机构。具有传动效率高、体积小、重量轻、结构简单、工艺性良好、传动功率范围大等优点,得到了广泛应用。不足之处是传动比范围较小。 以行星齿轮系中,齿轮副类型命名(用符号表示)的2K-H型齿轮系(图8-9)。由内齿圈b、太阳齿轮a、公用行星齿轮c及行星架H组成的单级行星齿轮系(图8-3)。属于负号机构。具有传动效率高、体积小、重量轻、结构简单、工艺性良好、传动功率范围大等优点,得到了广泛应用。不足之处是传动比范围较小。
N型齿轮系
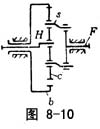
以行星齿轮系中齿轮副类型命名(用符号表示)的K-H-V型齿轮系(图8-10)。由内齿圈b、行星齿轮c行星架H及W输出机构组成的单级行星齿轮系。属于正号机构。它具有传动比范围大、结构紧凑、工艺性良好、行星齿轮中心轴承承受径向力较大的特点。适用于小功率短期工作的动力传动。
NGWN型齿轮系
 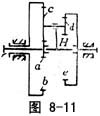 以行星齿轮系中齿轮副类型命名(用符号表示)的3K型齿轮系。由两个内齿圈(N)、一个双联行星齿轮(其中一个齿轮为公用行星齿轮G)、一个不承受转矩的行星架和一个太阳齿轮(W)组成的单级行星齿轮系(图8-11)。属于正、负号机构。它具有结构紧凑、体积小、重量轻、传动比范围大、传动效率低于NGW型齿轮系、工艺性差等特点。适用于中小功率,短期工作的场合。 以行星齿轮系中齿轮副类型命名(用符号表示)的3K型齿轮系。由两个内齿圈(N)、一个双联行星齿轮(其中一个齿轮为公用行星齿轮G)、一个不承受转矩的行星架和一个太阳齿轮(W)组成的单级行星齿轮系(图8-11)。属于正、负号机构。它具有结构紧凑、体积小、重量轻、传动比范围大、传动效率低于NGW型齿轮系、工艺性差等特点。适用于中小功率,短期工作的场合。
NW型齿轮系
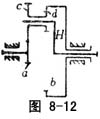
以行星齿轮系中齿轮副类型命名(用符号表示)的2K-H型齿轮系(图8-12)。是由内齿圈、太阳齿轮、双联行星齿轮及行星架组成的单级行星齿轮系。属于负号机构。它具有传动效率高、传动比范围大,比NGW型齿轮系径向尺寸小的优点,但比NGW型齿轮系轴向尺寸大,双联行星齿轮工艺性稍差。
  NN型齿轮系 NN型齿轮系
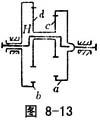
以行星齿轮系中齿轮副类型命名(用符号表示)的2K-H型齿轮系(图8-13)。由两个内齿圈(N)、一个双联行星齿轮和一个行星架组成的单级行星齿轮系。属于正号机构。它具有传动比范围大的优点,但传动效率较低,且随传动比的增大而减小,若以行星架为从动件时可能引起自锁,另外在工作中有较大的振动和噪声,这种行星齿轮系多用于短期或间断工作的动力传动。
WW型齿轮系
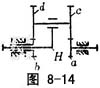
以行星齿轮系中齿轮副类型命名(用符号表示)的2K-H齿轮系(图8-14)。由两个太阳齿轮,一个双联行星齿轮和一个行星架组成的单级行星齿轮系。属于正号机构。其传动比范围很大,传动效率较低,并随传动比的增大而降低;外形尺寸和重量都较大,这种齿轮系一般不用于动力传动和分度传动。
ZUWGW型齿轮系
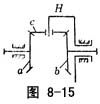
以行星齿轮系中齿轮副类型命名(用符号表示)的2K-H型齿轮系(图8-15)。由两个锥齿轮作为中心齿轮,一个公用行星齿轮及一个行星架组成的行星齿轮系。属于负号机构。它具有较高的传动效率,主要用于差动齿轮系。
双级NGW型齿轮系
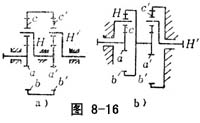
由两个NGW型单级齿轮系串联组成(图8-16)。这类行星齿轮系,不但克服了NGW型齿轮系传动比范围小的不足,而且保留了NGW型齿轮系的优点。图8-16 a行星架为活动构件;图8-16 b高速级行星架固定。这时,适用于高速传动。
 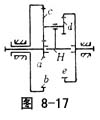 3K型齿轮系 3K型齿轮系
三个中心齿轮为基本构件的行星齿轮系(图8-17)。主要特点是:三个中心齿轮传递转矩。行星架不承受转矩,只起支承行星齿轮轴的作用。这类行星齿轮系,具有结构紧凑、体积小、传动比范围大的优点,但传动效率低、工艺性差。适用于中小功率、短期工作的场合。
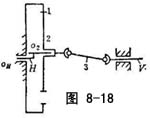
K-H-V型齿轮系
一个中心齿轮K、一个行星架H和一个输出轴V为基本构件的行星齿轮系(图8-18)。它只有一个中心齿轮,通过等角速比的输出机构,将行星齿轮的复杂运动中的转动部分由V轴输出。由于行星齿轮轴和输出轴交错,所以必须通过双万向联轴器(W机构)输出。这类行星齿轮系,齿轮的齿廓设计、输出机构的设计和工艺要求等都较高。
行星齿轮系的传动比
行星齿轮系的传动比是指:任意两个活动基本构件角速度或转速之比。亦即行星齿轮系主动的基本构件和从动的基本构件角速度或转速之比。
行星齿轮系传动比的计算方法很多,主要有行星架固定法、速度图解分析法,矢量图解分析法等。
行星架固定法
行星齿轮系和固定轴齿轮系的主要区别在于行星架的回转运动,导致行星齿轮轴线绕中心齿轮轴线转动,若能使行星架相对固定,则行星齿轮系可变成相对固定轴齿轮系,这时行星齿轮系可按照固定轴齿轮系计算传动比的方法,计算基本构件的转速,确定出所需传动比。
行星架固定法的依据是:在整个机构中的各个构件上加一个相同的运动速度,不影响各构件之间的相对运动关系。根据这一基本原理可假想在行星齿轮系中各构件上同时加一个(-ωH)角速度,这时各构件相对行星架架的角速度分别为

这时行星架相对静止,行星齿轮系变成了一个假想的固定轴齿轮系,这个假想的固定轴齿轮系称行星齿轮系的转化机构。显然假想的固定轴齿轮系传动比为:

式中,“±”号由主动齿轮和从动齿轮之间的转向关系确定。
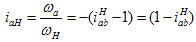
对于差动齿轮系,中心齿轮a、b都是活动构件,于是:ωa=ωb -(-1)ωH -(-1)ωH
差动齿轮系有两个自由度,所以必须给出三个基本构件中的两个基本构件的角速度(或转速)来确定第三个角速度(或转速)。三个角速度求得后,即可求得任意两基本构件间的传动比。
对于简单行星齿轮系,自由度为1,三个基本构件中只有两个是活动构件,如2K-H型齿轮系有一个中心齿轮固定(如ωb=0 ),这时可直接求得中心齿轮a和行星架之间的传动比:
应用行星架固定法求传动比,应注意如下事项:该方法仅适用于三个基本构件的回转轴线相互平行的平面(或空间)行星齿轮系;式中是假想的转化机构的传动比,要特别注意传动比“±”的确定,要特别注意ωa、ωb 、ωH之间的转向关系,只要把其中的任一个ω定为正向(或负向),另外两个ω就可定出其正、负,然后把“+”、“-”号代入公式即可准确的计算出传动比。对于复合行星齿轮系或非2K-H型齿轮系,要分解成单级2K-H型齿轮系和固定轴齿轮系,分别列出传动比计算式联立求解,当然行星齿轮系和复合齿轮系型式很多,给出统一的方法也很不确切,只能具体问题具体分析。
行星架固定法求传动比具有概念清楚、计算准确的优点,但也受到某些空间齿轮系不能应用的限制。
复合行星齿轮系传动比计算
复合行星齿轮系传动比是指输入轴和输出轴角速度(或转速)之比值。其计算方法是固定轴齿轮系和单级行星齿轮系传动比计算方法的联合应用。也就是说,把复合行星齿轮系分解成多个单级行星齿轮系,或分解成单级行星齿轮系和固定轴齿轮系,然后按其单级行星齿轮系或固定齿轮系的传动比计算方法,列出相应的传动比计算式,分析各计算式之间的有机联系,找出要求的未知量,联立求解即可求得需求的未知因素。
复合行星齿轮系传动比计算要特别重视下列事项:
(1)复合行星齿轮系的分解。
所谓分解就是把复合行星齿轮系分解成单级行星齿轮系和固定轴齿轮系(也可能没有)。按照单级行星齿轮系的定义,首先在复合行星齿轮系中,找出所有行星齿轮,接着找到行星架、中心齿轮,分解出单级行星齿轮系,应指出:有一个行星架就有一个单级行星齿轮系,复合行星齿轮系中含有的单级行星齿轮系个数等于含有的行星架个数,单级行星齿轮系,主要是指2K-H、3K、K-H-V型齿轮系。把所有单级行星齿轮系分解出来后,剩下的齿轮副必然组成一个或多个固定轴齿轮系。
(2)遇到3K型齿轮系,在列传动比方程式时,应遵照3K型齿轮系的特别处理办法。
(3)利用固定行星架法求传动比,利用转化机构通用公式,要特别注意的符号和ωa、ωb 、ωH的符号。
(4)列其联立方程时一定要找出各公式之间的有机联系,列出公式简单,求解方便的联立方程。
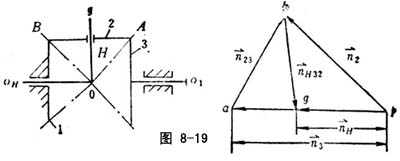 矢量图解分析法求传动比 矢量图解分析法求传动比
是按行星齿轮系运动学原理求传动比的一种方法。依据构件转速,可以表示为绕其轴线的转速矢量的性质,用矢量加法求未知速度矢量,然后求其传动比的一种方法。规定转速矢量按所绕轴线(相对转速矢量是绕瞬时轴线)由右手定则确定方向。选定比例尺,列出转速矢量式,即可求得未知转速大小,依此求传动比。见图8-19。
这种方法用于求含有锥齿轮副的行星齿轮系传动比十分方便。
速度图解分析法求传动比
按行星齿轮系运动学原理求传动比的一种图解分析方法。它是依据瞬心特征绘制速度图(图8-20),测出速度大小,求出角速度,计算传动比的方法。在行星齿轮系中任意两构件都有一个瞬心,活动构件和机架的瞬心称绝对瞬心,活动构件在该点的速度为零,当活动构件绕绝对瞬心转动时,其上各点的速度呈三角形分布。两活动构件组成的瞬心称相对瞬心,在相对瞬心处两活动构件的绝对速度相等,相对速度为零。显然中心齿轮和行星架的轴线与齿轮端平面的交点是绝对瞬心,两相啮齿轮的节点为相对瞬心(若一个齿轮为固定件则是绝对瞬心),不直接相联的两构件的瞬心可用“三心定理”求得。
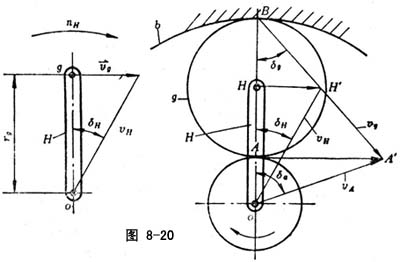 用速度图解法求传动比,应首先分析其运动特点求出各个瞬心,选定速度与长度比例尺,按已知条件绘出速度图,在速度图上测出未知点的速度大小和该点到瞬心的距离,分别乘以比例尺,求出实际速度和距离,两者的比值即为角速度ω,以此可求得中心齿轮和行星架的角速度大小,并结合速度图中的速度方向即可求得传动比。 用速度图解法求传动比,应首先分析其运动特点求出各个瞬心,选定速度与长度比例尺,按已知条件绘出速度图,在速度图上测出未知点的速度大小和该点到瞬心的距离,分别乘以比例尺,求出实际速度和距离,两者的比值即为角速度ω,以此可求得中心齿轮和行星架的角速度大小,并结合速度图中的速度方向即可求得传动比。
速度图解法求传动比,概念清楚、形象、直观、简便,但只能用于平面行星齿轮系。用这种方法,若要求得传动比与齿数关系则相当繁杂。
转矩法求传动比
依据不考虑摩擦时,速度和转矩成反比的基本原理,求行星齿轮系传动比的方法。如:
 , ,
“-”表示Ta、Tb方向相反。选定比例尺,按照三个基本构件承受的转矩(绕其轴线按右手定则确定方向),按照矢量加法写出矢量式,绘出矢量图,测出未知量即转矩大小,除以比例尺,求出实际转矩,即可求得传动比大小。
这种方法不但可以求得传动比,而且还可以求得转矩大小,为强度计算和传动效率计算打下基础。但计算复杂,适用于设计计算。
基本动力容量
行星齿轮系,太阳齿轮为主动构件时,太阳齿轮工作100万转,定义:可靠度为90%时,输入的转矩为该行星齿轮系的基本动力容量。
行星齿轮系的传动效率
行星齿轮系对输入功的有效利用率η称传动效率,亦即行星齿轮系的输出功(生产阻力功)与输入功(驱动功)之比值,它是小于1的数,一般用百分数表示。行星齿轮系种类繁多,型式不一,主动构件与从动构件各有不同,所以传动效率的变化范围甚大,为此确定其传动效率十分必要。确定传动效率的方法大致有两种,其一是计算法;其二是试验法。由于传动效率受很多因素的影响(如受制造工艺、安装工艺、精度等级,齿轮副材料、润滑条件等),故计算法确定的传动效率与实际结果相差较大,实践证明用试验法确定行星齿轮系的传动效率显得更为重要。
行星齿轮系的传动效率,一般包括齿轮副的啮合效率、轴承效率、液力效率、均载装置效率等,其中以啮合效率最为重要。
行星齿轮系的传动效率,随结构类型的不同而变化;同一类型随传动比的增大而降低;同一类型随主从件的更换而变化;随工艺条件、润滑条件、使用条件的不同而变化。
行星齿轮系的传动效率的理论计算方法很多,主要有转化机构啮合功率法;转化机构转矩法和传动比法等。其中以转化机构啮合功率法用的最多。
转化机构啮合功率法
是利用行星齿轮系的假想转化机构的啮合功率,求行星齿轮系传动效率的方法。该方法的依据是:转化机构和其行星齿轮系机构相比,它们的相对运动关系是一样的,也就是说只要作用的外转矩保持相同,则它们的啮合功率损耗是一样的。不过,由于ni变成了(ni-nH) ,所以各构件上的传递功率发生变化。 (ni-nH) 可能为正,也可能为负,这就证明转矩的方向和转速方向之间,可能发生变化,但只要行星齿轮系和转化机构中所用的外转矩保持相同,则它们的啮合功率就是相同的。于是:
PaH=TanaH=Ta(na-nH)
这时行星齿轮系和转化机构的功率关系是
PaH/Pa=TanHH/Tana=(na-nH)/na=1-1/iaH
使用上式应注意两种情况:
(1)太阳齿轮为主动件,行星架为从动件,输入功率Pa=Tana,这时行星齿轮系和转化机构中,太阳齿轮a的主从关系可能不变化也可能变化:当1-1/iaH>0时,太阳齿轮a仍为主动件,于是:
ηaH=[1-ηH(1-iaH)]/iaH
式中,ηH为转化机构的总啮合效率,等于各齿轮副啮合效率的连乘积。
当1-1/iaH<0时,太阳齿轮a在转化机构中变成从动件,于是:
ηaH=[ηH-(1-iaH)]/iaH・ηH
(2)太阳齿轮为从动件,行星架为主动件时,输出功率为Pa0=Tana。
当1-1/iaH>0时,太阳齿轮a在转化机构中仍为从动件,于是:
ηaH=iaHηH/[ηH-(1-iaH)]
当1-1/iaH<0时,太阳齿轮在转化机构中变成主动件,于是:
ηaH=iaH/[1-ηH(1-iaH)]
传动比法求传动效率
是求行星齿轮系传动效率的一种方法。该方法用于封闭差动齿轮系的传动效率较方便。这种方法求传动效率的依据是,传动效率可用转矩的比值与传动比的比值关系来表示,即:

广泛表达式为
i1n=f(i1、i2…in)
i1n=f(i1、i2…in)
于是在求得Ta/T1、ω1/ωn的基础上,即可求得传动效率。
 齿条 |
圆柱齿轮 |
圆锥齿轮 |
蜗轮蜗杆 |
非圆齿轮 |
特种齿轮 齿条 |
圆柱齿轮 |
圆锥齿轮 |
蜗轮蜗杆 |
非圆齿轮 |
特种齿轮
首页 |
进口齿条 |
进口齿轮 |
齿轮标准 |
询价必读 |
齿轮知识 |
网站地图
电话:010-6492-5308 | 传真:010-6492-5744 | 邮件:
sales@gearandrack.cn
2003-2012年北京正基元齿轮有限公司版权所有。本网站由北京正基元齿轮有限公司设计、制作、维护。
本网站上的任何内容,未经正基元公司的书面授权,均不得以任何方式复制、转载、或镜像,否则将追究其违权责任。 |