 齿轮系常用术语(一) 齿轮系常用术语(一)
齿轮系
 若干个齿轮副的任意组合称齿轮系。其功能是实现减速、增速、变速、换向、速度分解、速度合成、分路传动、实现大传动比、实现大中心距等。由于齿轮系功能众多,所以齿轮系在机械传动中占有极其重要的地位,得到了广泛应用。 若干个齿轮副的任意组合称齿轮系。其功能是实现减速、增速、变速、换向、速度分解、速度合成、分路传动、实现大传动比、实现大中心距等。由于齿轮系功能众多,所以齿轮系在机械传动中占有极其重要的地位,得到了广泛应用。
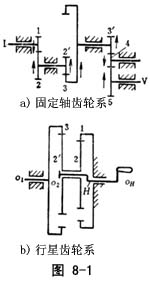
齿轮系分固定轴齿轮系和行星齿轮系两大类(图8-1)。
平面固定轴齿轮系
由平面齿轮副组成的固定轴齿轮系。其特点是:各齿轮的轴线都互相平行;主动轴与从动轴的转向关系可用(-1)m表示。m为齿轮系中外齿轮副的数目。
空间固定轴齿轮系
在固定轴齿轮系中至少含有一对空间齿轮副。这种齿轮系的特点是:主动轴和从动轴的转向关系不能用(-1)m表示(m为外齿轮副的个数),而必须用矢量符号在运动简图上示出。
减速齿轮系
在齿轮系中,若末端从动齿轮的角速度小于始端主动齿轮的角速度,则称这种齿轮系为减速齿轮系。
增速齿轮系
在齿轮系中,若末端从动齿轮的角速度大于始端主动齿轮的角速度,则该齿轮系称增速齿轮系。
固定轴齿轮系
若齿轮系中的所有齿轮,在工作过程中,其轴线位置均保持不变,则称这类齿轮系为固定轴齿轮系。在固定轴齿轮系中若所有齿轮副都为平面齿轮副,则称其为平面固定轴齿轮系;在固定轴齿轮系中只少含有一对空间齿轮副时称空间固定轴齿轮系。它们的功用主要是实现大传动比,大中心距、变速、换向、分路传动、多路合成传动等。
固定轴齿轮系传动比
固定轴齿轮系在工作中,首、末两齿轮构件角速度之比或转速之比称传动比,可表示为: 
若已知各对齿轮副的传动比数值,则固定轴齿轮系传动比的数值为: 
若已知齿轮系中每个齿轮的齿数,则固定轴齿轮系的传动比数值可由下式计算: 
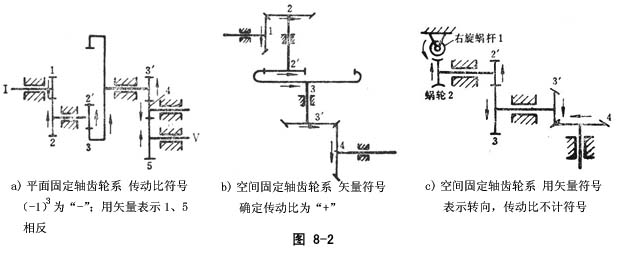
为了表明固定轴齿轮系中首、末两齿轮的相对转向关系,常用两种方法表示:
(1)对于首末两齿轮轴线平行的固定轴齿轮系,应在传动比数值计算公式前加“+”、“-”号,当首、末两齿轮转向相同时用“+”号,相反时用“-”号。
传动比“+”、“-”的确定分两种情况:1)对于平面固定轴齿轮系,传动比的“+”、“-”由(-1)m确定,m表示齿轮系中外齿轮副的个数(图8-2a)。2)对于空间固定轴齿轮系,传动比的符号不能用(-1)m公式确定,要应用齿轮系,运动简图上标注的转速矢量方向,判定首、末齿轮转向,确定“+”、“-”号(图8-2 b、c)。当然平面固定轴齿轮系,也可采用速度矢量标注法确定。
(2)对于首末齿轮轴线不平行的空间固定轴齿轮系,传动比数值前不加“+”、“-”号。但必须在其运动简图上标注速度矢量(图8-2 c)。
固定轴齿轮系传动效率
固定轴齿轮系对输入功的有效利用率称为传动效率。传动效率主要是指齿轮副的啮合效率。啮合效率的计算,视组成齿轮系的齿轮副之间是串联还是并联组合,若已知各齿轮副的啮合效率,则可根据串联或并联求效率的方法计算其总效率。若已知其他条件,可针对具体情况用啮合功率法、转矩法、传动比法求其传动效率。
行星齿轮系
在齿轮系运转时,其中至少有一个齿轮的轴线绕另一个齿轮的固定轴线转动,这类齿轮系统称行星齿轮系。曾称周转齿轮系。
行星齿轮系由行星齿轮、行星架、中心齿轮和机架组成。
行星齿轮系的类别很多,其分类方法也各不相同,常见的分类方法有:
按其运动特性及组合形式分为: 按含齿轮副的类别分为:

按含有基本构件及齿轮副名称分为:
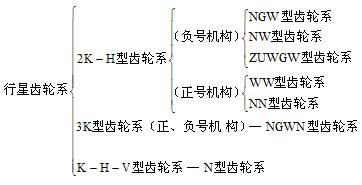
按其齿轮副的啮合特性及齿廓形状分为:
行星齿轮系的工作特点主要表现在:把固定齿轮轴线的固定轴齿轮系,改成了具有动轴线的齿轮系;利用功率分流式,采用多个行星齿轮分担载荷;合理利用了内齿轮副机构;具有体积小,重量轻、承载能力大,使用寿命长、传动效率高、工作平稳、噪声小、传动比范围大等优点。但有的行星齿轮系,传动效率随传动比的增大而降低,甚至产生自锁,大功率行星齿轮减速器结构较复杂,设计较困难,工艺性较差。
行星齿轮系除能完成固定轴齿轮系的大部分功能外,还可以实现速度合成和速度分解等功能。
平面行星齿轮系
由平面齿轮副组成的行星齿轮系。它的特点是:所有齿轮轴线都彼此平行。它是用途最广的行星齿轮系。
空间行星齿轮系
至少含有一对空间齿轮副的行星齿轮系。其特点是:各齿轮轴线不完全平行,其相对转向关系要用速度矢量符号表示。该行星齿轮系用的较少。
行星齿轮系的基本构件
在行星齿轮系中,凡是轴线与固定轴线重合,又承受转矩的构件,统称基本构件。各种行星齿轮系,往往以基本构件命名。如2K-H型齿轮系中,两个中心齿轮和一个行星架为基本构件;3K型齿轮系中,三个中心齿轮是基本构件。
 中心齿轮 中心齿轮
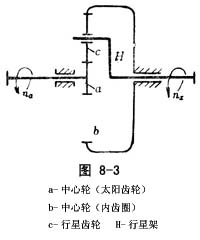
在行星齿轮系中,与行星齿轮相啮合,且具有固定轴线位置的齿轮称中心齿轮(图8-3a、b)。它是行星齿轮系的基本构件。外齿轮作为中心齿轮时,称太阳齿轮;内齿轮作为中心齿轮时称内齿圈。
太阳齿轮
在行星齿轮系中,作为中心齿轮的外齿轮称太阳齿轮。见图8-3。
内齿圈
在行星齿轮系中,作为中心齿轮的内齿轮称内齿圈。见图8-3。
行星齿轮
在行星齿轮系中,具有动轴线的齿轮,亦即作行星运动的齿轮。行星齿轮系和固定轴齿轮系的区别就在于有行星齿轮存在。见图8-3。
公用行星齿轮
一个行星齿轮同时和两个中心齿轮相啮合,组成两对齿轮副,这样的行星齿轮称公用行星齿轮,在行星齿轮系中用G表示。在其转化机构中是惰齿轮。见图8-3中的c齿轮。
行星架
在行星齿轮系中,支承行星齿轮轴并绕中心齿轮轴线转动的构件称行星架。在行星齿轮系中多属基本构件。行星架的结构形式多种多样,可能是一个转臂、也可能是回转的机体,其中以齿轮腹板作行星架为常见。见图8-3。
惰齿轮
在齿轮系的运动系统中,既作从动齿轮,又作主动齿轮的齿轮称惰齿轮,曾称惰轮、桥轮、过轮。惰齿轮在传动系统中仅影响传动比的符号(即齿轮间的相对转向)。总中心距的大小,而不影响传动比的数值。
单级行星齿轮系
只含有一个行星架的行星齿轮系。其行星齿轮可为单排,也可为双排,中心齿轮可能有1个、2个或3个。单级行星齿轮系是行星齿轮系的基本类型,是进行运动分析、受力分析和设计计算的基本单元。
简单行星齿轮系
只有一个行星架、自由度等于1的单级行星齿轮系。显然,对于2K-H型齿轮系来说仅有一个中心齿轮为活动构件。这类行星齿轮系用途最广。
正号机构
两个太阳齿轮,一个行星架或者两个内齿圈、一个行星架为基本构件的2K-H型齿轮系,其转化机构的传动比为正号,称这类2K-H型齿轮系的转化机构为正号机构。它的结构特点是:两中心齿轮或者是两太阳齿轮,或者是两内齿圈。其工作特点不如负号机构优越,主要表现在:随着传动比的增大,传动效率随之降低,甚至产生自锁现象。
负号机构
太阳齿轮、内齿圈、行星架为基本构件的2K-H型齿轮系的转化机构的传动比为负号,这类2K-H型齿轮系的转化机构称负号机构。它的结构特点是:两个中心齿轮分别为外齿轮(太阳齿轮)和内齿轮(内齿圈)。工作特点是:传动效率高、承载能力大、传递功率范围大、结构简单、体积小,工艺性好等优点,它是用途最广的行星齿轮系。
转化机构
见“行星架固定法”。
多级行星齿轮系
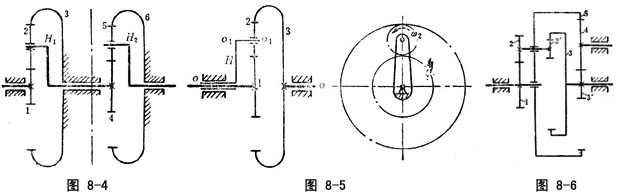
由两个或两个以上同类型单级行星齿轮系组成的复合行星齿轮系。在进行传动比计算、运动分析、受力分析、设计计算时,要分解成单级行星齿轮系。见图8-4。
复合行星齿轮系
固定轴齿轮系与行星齿轮系,或两个以上不同类型的单级行星齿轮系,组合到一起构成的复杂齿轮系。复合行星齿轮系可实现各种固定轴齿轮系、简单行星齿轮系、单级行星齿轮系及差动齿轮系无法实现的功能。如可实现很大的传动比范围;实现各种速度分流;速度合成;改变齿轮系自由度等。复合行星齿轮系,一般结构比较复杂,工艺性稍差,成本稍高。
差动齿轮系
只有一个行星架,自由度为2的单级行星齿轮系。亦即三个基本构件都为活动构件的单级行星齿轮系。一般情况下,两个中心齿轮由两个电机驱动,差动齿轮系可方便地设计成具有速度分解或速度合成的齿轮机构。
图8-5为NGW型差动齿轮系。
封闭差动齿轮系
是一种特殊的复合齿轮系。在这个复合齿轮系中,行星齿轮系部分是自由度为2的差动齿轮系,其余的定轴齿轮系或行星齿轮系把差动齿轮系的两个基本构件联接起来(即封闭起来),使整个复合齿轮系的自由度降为1。则这样的复合齿轮系称封闭差动齿轮系(图8-6)。
差动齿轮系的速度分解
差动齿轮系有三个基本构件和两个自由度。一个主动的基本构件的转速,在一定条件下可按所需的比例关系,分解为另两个基本构件的不同转速,这种运动关系称差动齿轮系的速度分解。
典型例证是ZUWGW型齿轮系,以汽车后桥差动齿轮箱为例,当za=zb时
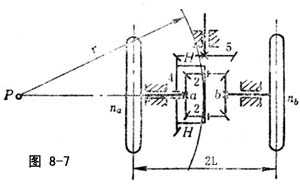 
再加汽车弯道处的辅助条件

于是可求得当r=∞,即直线行驶时,三个基本构件的转速相等na=nb=nH。当r≠∞,即弯道行驶时:
 见图8-7。 见图8-7。
差动齿轮系的速度合成
差动齿轮系有两个自由度,可见在三个基本构件中必须知道两个基本构件的独立运动参数,才能求知第三个基本构件的运动规律,这种知二求一的运动(速度)关系称差动齿轮系的速度合成。
如ZUWGW型齿轮系,ωb -ωa=(-1)×ωH当zb=za时,ωa+ωb=2ωH。这就可以说明当已知其中任意两个基本构件的转速,就可以合成求得第三个基本构件的转速。 -ωa=(-1)×ωH当zb=za时,ωa+ωb=2ωH。这就可以说明当已知其中任意两个基本构件的转速,就可以合成求得第三个基本构件的转速。
行星齿轮系中各齿轮齿数的选择条件
行星齿轮系是多个齿轮相啮合的齿轮系统,相互关系要求十分严格,所以各个齿轮的齿数选择应满足下列要求:保证实现既定的传动比;保证中心齿轮和行星架的同轴线条件(同心条件),满足安装条件的工艺要求;保证各行星齿轮间不发生碰撞(邻接条件)。
同心条件
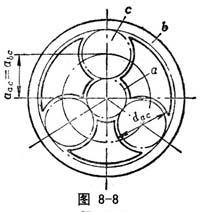
设计行星齿轮系时,应保证齿轮系基本构件绕同一轴线转动。为此对选择齿轮齿数的限制条件称同心条件。也就是说,行星齿轮和两中心齿轮相啮组成的两齿轮副的中心距必须相等,即ra′+rc′=rb′±rc′(“+”用于外啮合,“-”用于内啮合(图8-8)。
1.2K-H(NGW)型齿轮系
对于标准齿轮副、高变位齿轮副组成的NGW型齿轮系,其同心条件为:
由上式可知两中心齿轮的齿数要同时为偶数或奇数。
或者
由上式可知要满足同心条件 必须为偶数。
当为角变位齿轮副时
za+zc/cosaac′=(zb-zc)/cosabc′
角变位齿轮副齿数选择有较大的灵活性。
2.2K-H(NW、WW、NN)型齿轮系
对于标准齿轮副或高变位齿轮副组成的行星齿轮系的同心条件为:
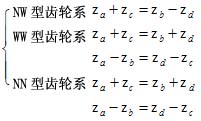
这三种类型的齿轮系,无论属于那种变位齿轮组成齿轮副,只要使两齿轮副中心距相等即可,即aac′=abd′。
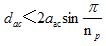
相邻条件
行星齿轮安装到中心齿轮之间后,相邻行星齿轮的齿顶曲面不相碰撞,而要有一定的间隙,为此选定齿数时应满足的条件即相邻条件。于是:
传动比条件
行星齿轮系实现既定传动比,是首先必须满足的条件,是确定各齿轮齿数的第一个限制条件。对于单级行星齿轮系下式成立:
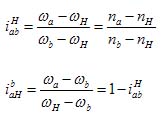 式中,是齿轮副中各齿轮齿数的函数,若已知角速度(或转速),可以求得不同行星齿轮系的齿数: 式中,是齿轮副中各齿轮齿数的函数,若已知角速度(或转速),可以求得不同行星齿轮系的齿数:
对于2K-H(NGW)型齿轮系:
zb=( -1)za -1)za
z∑=zb+za=/2
zb=2z∑-za
对于2K-H(NW、WW、NN)型齿轮系:
=1±zczb/zazd
式中,“+”号用于负号机构NW型齿轮系;“-”号用于正号机构WW、NN型齿轮系。负号机构NW型齿轮系的传动比条件式为:=(zazd+zbzc)/zazd。正号机构WW、NW型齿轮系的传动比条件式则为:=zczd/(zazd+zbzc)。
安装条件
在设计行星齿轮系时,应保证各行星齿轮均匀安装在两中心齿轮之间,这就必须合理地选择za、zc、zb等各齿轮的齿数,此即安装条件。这个条件主要表现在NGW型齿轮系中,其安装条件为:两中心齿轮的齿数和除以行星齿轮数应为整数,即:q=za+zb/nρ=整数,或q=2z∑/nρ=整数,z∑=za+zc=zb-zc
 齿条 |
圆柱齿轮 |
圆锥齿轮 |
蜗轮蜗杆 |
非圆齿轮 |
特种齿轮 齿条 |
圆柱齿轮 |
圆锥齿轮 |
蜗轮蜗杆 |
非圆齿轮 |
特种齿轮
首页 |
进口齿条 |
进口齿轮 |
齿轮标准 |
询价必读 |
齿轮知识 |
网站地图
电话:010-6492-5308 | 传真:010-6492-5744 | 邮件:
sales@gearandrack.cn
2003-2012年北京正基元齿轮有限公司版权所有。本网站由北京正基元齿轮有限公司设计、制作、维护。
本网站上的任何内容,未经正基元公司的书面授权,均不得以任何方式复制、转载、或镜像,否则将追究其违权责任。 |