 啮合原理・共轭曲面的啮合理论 啮合原理・共轭曲面的啮合理论
啮合
一对齿轮的共轭齿面依次交替的接触,从而实现齿轮有规律的相对运动过程和形态,称齿轮副的啮合。
啮合点
齿轮副的共轭齿面∑(1)与∑(2)在啮合过程中的每一时刻t,至少有一个点相切触,这个切触点称共轭齿面∑(1)与∑(2)在时刻t的啮合点。
 啮合极点 啮合极点
齿轮副在啮合过程中,啮合线的界限点称啮合极点。如图4-21所示,平行轴外啮合渐开线齿轮副,在端平面内,啮合线与基圆的切点N1、N2即啮合极点。若齿轮顶圆越过了啮合极点,则要产生啮合干涉或切削干涉(或称切齿干涉)。
共轭齿廓
一对相啮合廓,若在整个啮合过程中,不但能按照既定的运动规律运动,而且在每个时刻t,两齿廓的接触点都满足条件式  ・ ・ (12)=0,则称这一对相啮齿廓为共轭齿廓。 (12)=0,则称这一对相啮齿廓为共轭齿廓。
共轭曲面
曲面∑(2)是坐标系σ(2)里的曲面族{∑(1)}的包络面,∑(2)由曲面∑(1)及∑(1)和∑(2)的相对运动而定。曲面∑(2)就称作∑(1)在这个相对运动条件下,曲面∑(1)的共轭曲面,若∑(1): (1) =(1)(u,v),则共轭曲面∑(2)的方程式为: (1) =(1)(u,v),则共轭曲面∑(2)的方程式为:
共轭曲面的对称性
有共轭曲面∑(1)、∑(2),若曲面∑(2)是曲面族{∑(1)}的包络面,反之曲面∑(1)亦是曲面族{∑(2)}的包络面,则曲面∑(1)、∑(2)互为包络面的特性称共轭曲面的对称性。在一般情况下没有这种对称性。具有对称性的条件是:∑(1)上没有一界共轭线;∑(1)上没有二类界限线,即没有非工作区;两条接触线只取被二类界限线分成两段中的一段(即只进入一次接触)。
共轭啮合理论
设共轭曲面∑(1)、∑(2)的转角分别为dφ1、dφ2, ,S为啮合面,揭示∑(1)、∑(2)、φ1、φ2、S, 之间关系的规律性问题,则为共轭啮合理论,一般分三种情况: ,S为啮合面,揭示∑(1)、∑(2)、φ1、φ2、S, 之间关系的规律性问题,则为共轭啮合理论,一般分三种情况:
第一类问题是已知∑(1)、∑(2)与∑(1)的运动参数φ1、φ2,求∑(2)及S;第二类问题是已知S、φ1、φ2求∑(1)、∑(2);第三类问题是已知∑(1)、∑(2)和∑(1)(或∑(2))的运动参数φ1(或φ2 ),求S及∑(2)(或∑(1))的运动参数φ2(或φ1)。
齿廓法线法
在平面齿轮副中,常通过已知齿轮1,用齿廓法线法求共轭齿廓2。齿廓法线法是指利用给定的齿廓1,按照齿轮副的运动规律和威利斯定理,求得瞬时啮合点,这些点在静坐标系中的轨迹是啮合线,在σ(2)的坐标系中,啮合点(切触点)的轨迹是齿廓2,这种求共轭齿廓2的方法,即齿廓法线法。
运动学法
在齿轮啮合原理中,用运动学法讨论齿面共轭啮合问题有普遍意义和广泛用途。其理论依据是:在共轭齿面啮合点处,相对运动速度(12),位于共轭齿面啮合点处的公切面内,亦即啮合点处的公法矢和相对运动速度(12)垂直,即 ・(12)=0。
齿轮共轭的三个基本条件
一对齿轮能配对组成共轭啮合的齿轮副,必须满足三个基本条件:两齿轮相啮齿面上的一对共轭点在接触位置时必须重合;两齿轮相啮共轭齿面,在接触点处必须相切,同时两共轭曲面的实体必须错开(1=-2)以免发生曲率干涉;两相啮共轭齿面,在共轭接触点处的相对运动速度必须位于其公切面内,亦即相对运动速度与接触点处的公法线垂直,・(12)=0。
特征点
假定{St}曲面族中St上没有奇点,有包络面Σ存在,共方程为:=(u,v)(或= (v,t)),设Φu、Φv不同时为零,这时在Σ上u×t=0的点称Σ上的特征点,即∑上的奇点,其条件是Φ(u,v,t)=0、φ(u,v,t)=0。 (v,t)),设Φu、Φv不同时为零,这时在Σ上u×t=0的点称Σ上的特征点,即∑上的奇点,其条件是Φ(u,v,t)=0、φ(u,v,t)=0。
特征线
设曲面族{St},有包络面∑存在,则St和Σ在一般情况是线接触,而不是点接触。这条接触曲线Ct称为St上的特征线,亦即通常所谓的瞬时接触线,Ct是时间t的函数,Ct的集合即包络面Σ。
共轭点
满足啮合条件的共轭齿面∑(1)和∑(2)上的点M(1)与M(2),在时刻t相重合(啮合)则称M(1)与M(2)为共轭齿面上的共轭点。
啮合函数
设齿面Σ:=(u,v),令Φ(u,v,t)= ・(12)=0称Φ为啮合函数。作为数积的Φ,可以在不同的坐标系里计算,若取 为齿面在啮合点处的单位法矢,则称Φ为狭义啮合函数,若用一个函数Φ(u,v,t)=0代替函数Φ(u,v,t),当  为零时仍然是啮合点的充要条件,则称为广义啮合函数。如不是以单位矢量代入时,即为广义啮合函数。 为零时仍然是啮合点的充要条件,则称为广义啮合函数。如不是以单位矢量代入时,即为广义啮合函数。
广义啮合函数
见“啮合函数”。
啮合方程式
齿面∑(1)、∑(2)在啮合点处的公法线,垂直于该点处两齿面的相对运动速度 (12),其数学表达式为:・(12)=0,该式称啮合方程式。它是齿面接触点成为共轭啮合点的充要条件。
啮合参数方程式
啮合方程式・(12)=0写成参数形式为:Ucosφ-Vsinφ=M。
称上式为啮合参数方程式,式中U、V、M为以坐标参数表示的算式,不同情况有不同形式。为便于分析问题通常又写成:
 。 。
接触方程式
设曲面族{St}中的曲面St:=(u,v),其包络面存在,设其矢量方程Σ: *=*(u*,v*)。若St没有奇点,则Φ(u,v,t)≡(u,v,t)=0(这时Φu,Φv不同时为零)称为接触方程式,这时包络面方程式为:
接触线法线
在接触点处,齿面∑(1)与∑(2)公切面的法线称在该点处接触线法线。
啮合面
共轭齿面∑(1)、∑(2)在啮合过程中啮合线的集合面称啮合面,一般情况下啮合面是位在静坐标系中的空间曲面,在特殊情况下也可能是平面,如渐开线圆柱齿轮副,其啮合面即是两齿轮基圆柱面的公切面。
 啮合曲面 啮合曲面
一对齿轮副的共轭齿面,在啮合过程中,啮合线的轨迹曲面,亦即齿面瞬时接触线在固定坐标系里的轨迹曲面,称啮合曲面。
对平行轴齿轮副,啮合曲面也就是该齿轮副在各个端截面上的端面啮合线组成的曲面。
接触线(瞬时接触线)
共轭齿面∑(1)、∑(2)在啮合过程中,在某一时刻t齿面∑(1)、∑(2)上接触点的集合称接触线,亦称瞬时接触线。若动坐标σ(1)与σ(2)分别和齿轮1、2固连,则接触线在动坐标σ(1)、 σ(2)里的集合分别形成齿面∑(1)、∑(2)。
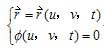
亦即齿轮副相啮齿面在啮合过程中在某一瞬时所有接触点在齿面上的集合线。图4-22所示为平行轴渐开线斜齿圆柱齿轮副的接触线。
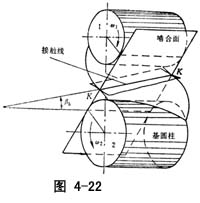
瞬时接触点(接触点)
两相啮共轭齿轮,在某一瞬时齿廓的公切点,称瞬时接触点亦称切触点。瞬时接触点与齿面上的共轭点相重合(图4-23)。
啮合线
共轭齿面∑(1)、∑(2)在啮合过程中,啮合点在静坐标系σ中的集合线称啮合线。
啮合平面
啮合平面是啮合曲面的特例,如平行轴渐开线齿轮副的啮合曲面蜕化成和两基圆柱相切的公切面,亦即渐开面(或渐开螺旋面)的发生面(图4-22)。
啮合区域
一对共轭轮齿,从开始进入啮合,到终止退出啮合,啮合线所构成的实际(真实)啮合面,称啮合区域。如平行轴渐开线圆柱齿轮副啮合区域是啮合面上的一个矩形面积。亦即啮合曲面上有效共轭齿面啮合的区域。
非工作区域
由啮合参数方程式可知,当M2>U2+V22时,cos(δ+φ)无解,即这些点不满足共轭条件,不参于啮合,这些点的集合形成了齿面上不参于啮合的区域,称为非工作区。见“二次接触作用”。
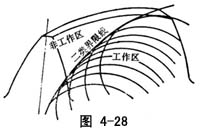
齿面工作区域
在齿面∑(1)上,既不含有二类界限点,又不含有一界共轭点,只含有共轭啮合点的领域;在齿面∑(2)上,不含有一类界限点,也不含有二界共轭点,只有共轭啮合点的领域,统称齿面工作区(图4-28)。
相啮轮齿的追越面和被追越面
两个相对滚动兼滑动的滚子,在接触线上周速大的辊子表面称追越面,周速小的辊子表面称被追越面。齿轮副中两相啮轮齿表面,具有相对滚动兼滑动的运动状态,随着啮合点(或线)的位置变化,速度大小也在变化,节线以上齿面(暂称上齿面)和节线以下齿面(暂称下齿面)相啮时,上齿面的齿面切向速度,总大于下齿面的齿面切向速度。按其定义,一对相啮齿面,其上齿面总是追越面,下齿面总是被追越面。定义齿轮轮齿追越面和被追越面的目的是为了研究点蚀机理。
相对(瞬时)螺旋运动轴
在每个时刻t,齿轮副共轭啮合点处的相对运动是相对螺旋运动,螺旋运动轴a-a称为相对(瞬时)螺旋轴,轴上各点满足条件(12)× (12)=0。若设X、Y、Y为螺旋轴上任意的坐标,则: (12)=0。若设X、Y、Y为螺旋轴上任意的坐标,则:
示图见“相对螺旋运动”。
相对螺旋运动
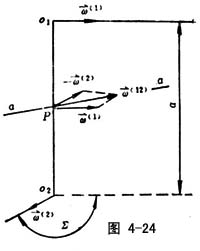
在每个时刻t,齿轮副共轭齿面切触点处的相对运动,可以转化成既绕a-a轴转动,又沿a-a轴方向移动的运动,称为相对螺旋运动(图4-24)。在时刻t,若(12)=0,则螺旋运动蜕化成平动。
相对螺旋运动参数为
瞬时轴
在平行轴和相交轴齿轮副中,两齿轮作相对回转运动的轴线;在交错轴齿轮副中,两齿轮作相对(瞬时)螺旋运动的轴线,通常亦称瞬时轴。
共轭轴
在交错轴齿轮副中,两齿轮的相对运动,是相对螺旋运动,若把相对螺旋运动分解成两个分转动,称分转动的两条轴线为共轭轴,共轭轴不是唯一的,当相对螺旋运动给定后,可分解成多组分转动,故共轭轴亦有多对。
转轴
动点回转运动的绕轴为转轴,其特点是轴上各点的轴向速度x=0,对于相对运动,称相对运动转轴,轴上各点的相对运动速度(12)=0。
滚动接触的共轭曲面
若一对共轭曲面接触点处的相对运动速度(12)恒等零((12)≡0) ,则称这对共轭曲面为在既定的两轴间相对运动条件下的一对滚动接触共轭曲面。亦称节面。
共轭环面
环面可作为齿轮齿面,若两齿轮组成共轭齿轮副,则这两个齿轮的齿面为共轭曲面,称共轭环面,共轭环面有两个主要特点:
定理1:以平行轴或相交轴齿轮副,两节曲面上的齿线Γ1和Γ2为基线,则母圆半径相等的两环面F1和F2为线接触的共轭环面(共轭曲面),在任意瞬时两共轭环面的接触线是圆心位于瞬时轴上的母圆。
定理2:对于两齿面为环面的任意齿轮副,若齿轮副按给定规律运动时,两环面的基线恒保持相切,则两环面在该运动条件下互为共轭曲面(互为共轭环面)瞬时接触线是以两基线的切点为圆心的母圆。
瞬心线
齿轮1相对齿轮2,或齿轮2相对齿轮1,在共轭啮合过程中,瞬时中心P在与两齿轮固连的动坐标中,形成的两条纯滚动且在P点相切的曲线称齿轮副的瞬心线。它是两瞬轴面与齿轮端平面的交线。设切点P(瞬心)到齿轮回转中心的距离分别为r1′和r2′,则中心距a≡r1′+r2′。对于定传动比的齿轮副,瞬心线是两个相切的圆(图4-25 a),齿条副是一个圆和一条相切的直线(图4-25 b)。变传动比齿轮副是两条相切的闭合曲线(图4-25 c),齿条副是一条闭合曲线和一条相切的曲线(图4-25 d)。

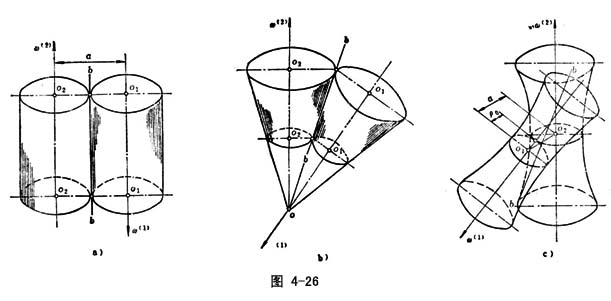
瞬轴面
齿轮副的相对(瞬时)螺旋运动轴b-b,分别绕齿轮轴 (1)、(2)转动所形成的轨迹回转面称为齿轮l、2的瞬轴面,齿轮副的两个瞬轴面相切。不同类型的齿轮副,具有不同的瞬轴面,当i12=常数时,平行轴齿轮副的瞬轴面是圆柱面图4-26 a;相交轴齿轮副的瞬轴面为圆锥面图4-26 b;交错轴齿轮副的瞬轴面是双曲面图4-26 c。
轮齿接触分析
一种采用数学方法确定一对啮合区接触的理论形状和位置的方法。
共轭方向
设c(1)是齿面∑(1)上经过P(1)点的任意曲线,c(2)是齿面∑(2)上经过P(2)点的曲线,若齿面∑(1)、∑(2)在啮合过程中,在时刻t0,P(1)、P(2)点重合(啮合)这时称c(1)、c(2) 的方向的共轭方向。
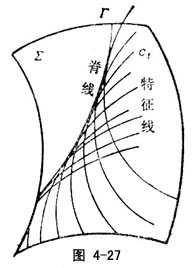 脊线 脊线
给定条件见“包络面”。若包络面上的特征线族有包络线Γ存在(图4-27),则Γ线称为∑上的脊线,亦称曲面{St}上的脊线。脊线上的点一般为包络面上的奇点,脊线上的点都是特征点。
一类界限点
齿面∑(2)是齿面族{∑(1)}的包络面,∑(2)(或{∑(1)}的特征点称∑(1)的一类界限点,又称根切界限点。一类界限点处的特点是  。一类界限点的条件是Φ(u,v,t)=Ψ(u,v,t)=0 。一类界限点的条件是Φ(u,v,t)=Ψ(u,v,t)=0
式中,Ψ(u,v,t)称为一类界函数。
一类界限线
一类界限点在齿面∑(2)上的集合(轨迹)线称一类界限线,一类界限线是齿面∑(2)上的脊线。若将齿面∑(1)作为刀具刃面,当∑(1)的齿面超过∑(2)上的一类界限线时,与其共轭线的齿面∑(2)则要产生根切。故又称一类界限线为根切界限线,其数学式为
一类界函数
满足一类界限点条件的函数式Ψ(u,v,t)=0称一类界函数,(见“一类界限点”),一类界函数亦分广义和狭义两种界函数。
一界共轭点
齿面∑(1)上满足条件Φ=Ψ=0的点,和∑(2)上的一类界限点一一对应,这些点称齿面∑(2)上一类界限点在齿面∑(1)的共轭点,简称一界共轭点。一界共轭点在∑(1)上不是奇点。
一界共轭线
一界共轭点在齿面∑(1)上的集合线称一界共轭线。一界共轭线不是∑(1)上的脊线,它不是奇点的集合,然而,若∑(1)作为刀具刃面,∑(1)的齿面超过了一界共轭线,则加工∑(2)时将产生根切。
二类界限点
齿面∑(1)与齿面∑(2)在啮合过程中,齿面∑(1)存在参于啮合和不参于啮合的两部分,这两部分的分界点称二类界限点。其特征是: ,  。∑(1)上的点成为二类界限点的条件是:Φ1(u,v,t)=Φ(u,v,t)=0。 。∑(1)上的点成为二类界限点的条件是:Φ1(u,v,t)=Φ(u,v,t)=0。
 二类界限线 二类界限线
二类界限线是二类界限点在齿面∑(1)上的集合线。它把齿面∑(1)分成工作区和非工作区两部分(图4-28)。
二类界函数
在齿面∑(1)上满足二类界限点的充要条件之一的函数式:Φt(u,v,t)=0称二界函数。有狭义二类界函数和广义二类界函数之分。
二界共轭点
齿面∑(2)上和齿面∑(1)上的二类界限点一一对应的点,称∑(2)上的二界共轭点。亦即在齿面∑(2)上,满足条件式Φt=Φ=0的点,称为∑(1)上二类界限点的二界共轭点。
二界共轭线
在齿面∑(2)上,二界共轭点的集合线,称为∑(1)上二类界限线在齿面∑(2)上的二界共轭线。
二界法曲率
在二类界限点处,ψ≠0,v(12)≠0,于是P点为∑(2)上的二界共轭点,但不是一类界限点(啮合点),故在P点处ψ≠0,这时称P点处沿 (12)方向的法曲率称二界法曲率。
 一次接触作用 一次接触作用
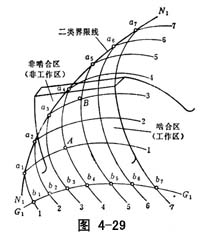
由“啮合参数方程式”可知,当M2=U2+V2时cos(σ+φ)只有一个解,亦即在共轭齿面上满足此条件的点,齿轮转一周的时期内,齿面只能一次进入啮合,这种现象称一次接触作用。这些一次作用点,在齿面∑(1)上的集合即二类界限线,它把齿面∑(1)分成了工作区和非工作区两部分。见图4-29。
二次接触作用
由“啮合参数方程式”可知,当M2<U2+V2时cos(σ+φ)有两个解,这些点位在啮合区内,当齿轮转一周时,它们将两次进入啮合,这种现象称二次接触作用。由图示可看出,在啮合区内,接触线是彼此相交的,其交点就是在不同时刻两次进入啮合的点,在啮合区内所有点都有两次进入啮合的可能(图4-29)。
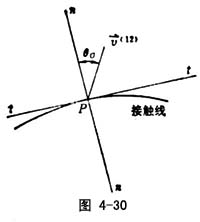
滑动角
共轭齿面在啮合点处,相对运动速度(12)与该点处接触线切线方向所夹锐角θt称滑动角。它表明了(12)在和 方向分量大小,体现了啮合点处的润滑条件,该角θt越接近90°,表明(12)在法线方向分量越大,在切线方向的分量越小,这时共轭齿面间的润滑条件越优。设法线方向的固定矢为 方向分量大小,体现了啮合点处的润滑条件,该角θt越接近90°,表明(12)在法线方向分量越大,在切线方向的分量越小,这时共轭齿面间的润滑条件越优。设法线方向的固定矢为  *,则: *,则:
  式中,相对运动速度 式中,相对运动速度  。 。
润滑角
共轭齿面在啮合点处,法线矢量和相对运动速度矢量(12)之间所夹的锐角,称润滑角。它和滑动角互为余角θv =90-θt 。见图4-30。
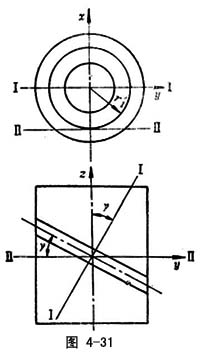
啮合轴
传动比为常数的齿轮副,在共轭啮合过程中,齿面∑(1)与∑(2)在啮合点处的公法线都通过一条空间固定直线,这条直线称为齿锥副的啮合轴,在平行轴和相交轴齿轮副中,仅有一条啮合轴,位在两齿轮轴线所在的平面内,且和相对螺旋轴重合。交错轴齿轮副有两条啮合轴。如∑=90°的蜗杆副,啮合轴的位置为Ⅰ-Ⅰ(XI,KI)和Ⅱ-Ⅱ( XⅡ,KⅡ),右旋蜗杆副KI=ctgγ、 XⅡ=0、KⅡ=0、XⅡ=-r1′。左旋蜗杆副KI=-ctgγ、XI=0、KⅡ=0,XⅡ=-r1′,如图4-31所示。
 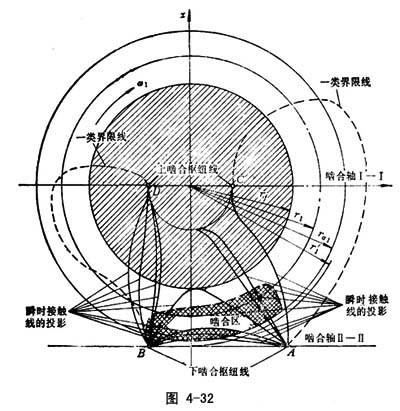
啮合枢纽线
圆弧圆柱蜗杆(ZC蜗杆)副的啮合面是空间曲面,若用平行于蜗杆副中间平面的平面去截,则可得到四条截直线,称这四条直线为啮合枢纽线。其中有两条和啮合轴Ⅰ-Ⅰ相交,称上啮合枢纽线;有两条和啮合轴Ⅱ-Ⅱ相交称下啮合枢纽线。啮合枢纽线与蜗杆端平面的交点称啮合枢纽点,用A、B、C、D表示(见图4-32)。啮合枢纽线的性质有:它们是平行于蜗杆轴线的直线,其位置是和蜗杆副运动参数无关的空间直线;上啮合枢纽点C、D对称于中间平面,下啮合枢纽线A、B不对称于中间平面,啮出侧的一根啮合枢纽线靠近中间平面;横向接触线,一类界限线都通过啮合枢纽线,所以可通过啮合枢纽线的位置来判断接触线形状的优劣与是否发生根切。
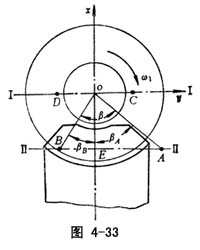 接触线特性角 接触线特性角
横向接触线通过啮合枢纽点,图4-33∠AOB反映了A、B两点之间的距离大小, 越小,接触线形状越陡,越有利于动压油膜的形成,所以角∠AOB=β的大小,可以大致表示接触线形状和其优劣,故称β角为接触线特性角。图4-33示: 越小,接触线形状越陡,越有利于动压油膜的形成,所以角∠AOB=β的大小,可以大致表示接触线形状和其优劣,故称β角为接触线特性角。图4-33示:
线接触制齿轮副
按照共轭啮合理论,设计成的线啮合齿轮副。它在啮合过程中,瞬时相啮齿面呈现线接触。其特点是:接触线的集合形成有效齿面;具有横向重合度和纵向重合度(可能为零)。如渐开线圆柱齿轮副等。
点啮合齿轮副
齿轮副在工作过程中,瞬时相啮齿面呈现点接触,这类齿轮副统称点啮合齿轮副。其特点是接触点的集合在齿面上仅形成一条(或两点)接触线,不形成齿轮的可用齿面,另外也只有纵向重合度。它包括点啮合制齿轮副、交错轴斜齿圆柱齿轮副、失配啮合蜗杆副等。
点啮合制齿轮副
按照齿轮共轭啮合理论,设计成的点啮合齿轮副。它是齿轮啮合理论中的一个分支。点啮合制齿轮副在工作过程中,呈现点接触。其特点是:接触点的集合仅形成一条接触线,不形成齿轮的可用齿面;仅有纵向重合度。它可分为单点啮合齿轮副和双点啮合齿轮副,如圆弧齿轮副等。
失配啮合制
用间接展成法加工出来的配对蜗杆与蜗轮组成的蜗杆副的啮合,统称失配啮合。所谓间接是指:工艺参数、齿形参数、啮合参数与蜗杆(或蜗轮)或蜗杆副发生了变化。广义上讲,间接展成的蜗轮与圆柱蜗杆的啮合;修正型“环面蜗杆”与蜗轮的啮合等都可称失配啮合。狭义的如锥面(或柱面)包络环面蜗杆与直廓环面蜗杆配对蜗轮的啮合;渐开线圆柱齿轮与平面包络环面蜗杆的啮合等。失配啮合可改善安装条件、啮合特性、润滑条件与对制造误差的敏感性。
齿条 |
圆柱齿轮 |
圆锥齿轮 |
蜗轮蜗杆 |
非圆齿轮 |
特种齿轮
首页 |
进口齿条 |
进口齿轮 |
齿轮标准 |
询价必读 |
齿轮知识 |
网站地图
电话:010-6492-5308 | 传真:010-6492-5744 | 邮件:
sales@gearandrack.cn
2003-2012年北京正基元齿轮有限公司版权所有。本网站由北京正基元齿轮有限公司设计、制作、维护。
本网站上的任何内容,未经正基元公司的书面授权,均不得以任何方式复制、转载、或镜像,否则将追究其违权责任。 |