 齿轮副・运动与速度 齿轮副・运动与速度
转速
 转速是工程上常用的,表示动点绕回转轴转动快慢程度的物理量(r/min)。亦可叙述为:每分钟动点绕回转轴转过的转数。它和角速度的量值关系为:n=30ω/π≈10ω(r/min)。 转速是工程上常用的,表示动点绕回转轴转动快慢程度的物理量(r/min)。亦可叙述为:每分钟动点绕回转轴转过的转数。它和角速度的量值关系为:n=30ω/π≈10ω(r/min)。
速度
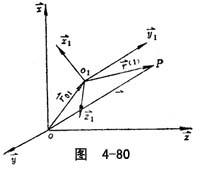
单位时间(s)内,动点相对参考坐标系的变动程度称为动点相对参考坐标系的速度。若参考坐标系是动坐标系称为相对速度,参考系为静坐标系,则称为绝对速度,动坐标系相对静坐标系的速度称为牵连速度,见图4-80。
角速度
动点在时刻t绕回转轴的转角为φ,在时刻t+Δt的转角为φ+Δφ,则角速度ω定义为:
 动点匀速运动时,角速度可叙述为:动点每秒绕回转轴转过的弧度(rad/s)。角速度是矢量和回转轴重合,正向由右手定则确定。角速度坐标式为 动点匀速运动时,角速度可叙述为:动点每秒绕回转轴转过的弧度(rad/s)。角速度是矢量和回转轴重合,正向由右手定则确定。角速度坐标式为  =ωx =ωx +ωy +ωy +ωz +ωz 。角速度与转速的量值关系为: 。角速度与转速的量值关系为:
圆周速度
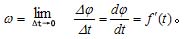
设动点P绕回转轴a-a以的角速度转动,这时,P点的速度为 =× =× ,||=||・||×sinθ=||・R,定义:||=||R为圆周速度,圆周速度的大小,等于动点到回转轴a-a的最短距离R,乘以角速度ω。圆周速度亦称动点的线速度 ,||=||・||×sinθ=||・R,定义:||=||R为圆周速度,圆周速度的大小,等于动点到回转轴a-a的最短距离R,乘以角速度ω。圆周速度亦称动点的线速度
 。见图4-81。 。见图4-81。
轴向速度
动点沿回转轴线方向的移动速度,称动点的轴向速度。直齿圆柱齿轮副,啮合点的轴向速度为零。斜齿圆柱齿轮副啮合点的轴向速度为vx=πmz×n/60×1000或vx=Pω(P为螺旋参数)。
螺旋线上的动点速度
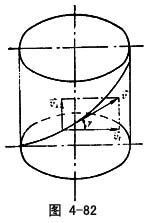 螺旋线上任意点的速度,总是沿着该点的切线方向,它可分解成圆周速度vt=Rω及轴向速度vx=Pω(或vx=πmzn/60×1000或vx=vttgγ)(图4-82)。 螺旋线上任意点的速度,总是沿着该点的切线方向,它可分解成圆周速度vt=Rω及轴向速度vx=Pω(或vx=πmzn/60×1000或vx=vttgγ)(图4-82)。
卷入速度
齿面共轭啮合点处的相对运动速度(12)在法线方向的分量n(12)称卷入速度。n(12)=(12)cosθσ=(12)sinθt,|n(12)|=|(12)|cosθσ。
空间啮合运动的自由度
在齿轮副啮合过程中,有四个运动参数:齿轮1的转角φ1,齿轮2的转角φ2,动坐标σ1、σ2原点的移动速度σ1、σ2。所谓空间啮合运动的自由度是指:φ1、φ2、σ1、σ2中独立运动参数的数目。
单自由度啮合运动
是指齿轮1、2的转角φ1、φ2,动坐标σ1、σ2的原点移动速度σ1、σ2中只有一个独立运动量的啮合运动。如蜗杆副、平行轴间的齿轮副、交错轴间的齿轮副、相交轴间的齿轮副,都属于单自由度啮合的齿轮副。
双自由度啮合运动
是指齿轮1、2的转角φ1、φ2及动坐标σ1、σ2的原点移动速度σ1、σ2中有两具独立运动量的啮合运动。如普通剃齿运动、蜗杆磨齿、切向进给加工蜗轮等都属于双自由度啮合运动。
三自由度啮合运动
是指齿轮1、2的转角φ1、φ2,动坐标σ1、σ2的原点移动速度σ1、σ2中,有三个独立运动量的啮合运动。如对角剃齿法、对角滚齿法等都属于三自由度啮合运动。
共轭接触点处的速度
齿轮副共轭点处的绝对速度矢量为:
 式中,
式中,  为齿面Σ在接触点处相对静坐标系的速度即绝对速度,两共轭齿面在啮合点处的绝对速度相等;(1)×(1)+σ1、(2)×(2)+σ2是动坐标系相对静坐标系的速度即牵连速度; 为齿面Σ在接触点处相对静坐标系的速度即绝对速度,两共轭齿面在啮合点处的绝对速度相等;(1)×(1)+σ1、(2)×(2)+σ2是动坐标系相对静坐标系的速度即牵连速度; 为共轭点处,分别相对所在动坐标系的速度即相对速度。 为共轭点处,分别相对所在动坐标系的速度即相对速度。
齿面切触点的相对速度
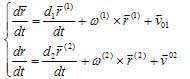
 齿轮副在啮合过程中,共轭切触点在齿面上的位置是时间的函数,亦即切触点相对动坐标的位置是变动的,切触点相对动坐标的变动速度称齿面切触点的相对速度。其表达式分别为: 齿轮副在啮合过程中,共轭切触点在齿面上的位置是时间的函数,亦即切触点相对动坐标的位置是变动的,切触点相对动坐标的变动速度称齿面切触点的相对速度。其表达式分别为:

相对速度 亦称相对微商。 亦称相对微商。
齿面切触点的牵连速度
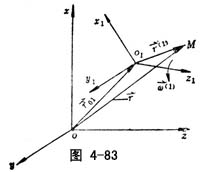
设齿面∑(1)和动坐标σ(1)固连,动坐标既移动又转动,移动速度为σ1,绕z1轴转动的角速度矢量为(1),如图4-83,所以=σ1+(1),于是齿面上M点的速度矢量为σ(1)=σ1+(1)×(1)。齿面上固定点M的速度等于动坐标原点σ1的移动速度和动坐标转动线速度的矢量和,该速度(1)称齿轮副在啮合过程中齿面∑(1)上M点的牵连速度。实际上牵连速度是动坐标系相对静坐标系的速度。
齿面切触点的绝对速度
齿面切触点的绝对速度是齿面切触点相对静坐标的速度。它是切触点处牵连速度和相对速度矢量之和,齿面∑(1)、∑(2)在切触点处绝对速度相等。于是
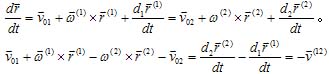
牵连速度之差和相对运动速度之差仅仅相差一个符号。其模与相对运动速度|(12)|相等。
齿轮副的相对运动速度
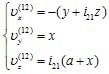
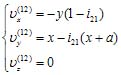
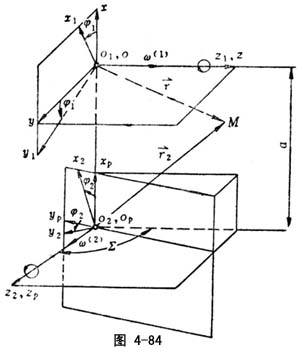 共轭齿面瞬时切触点M处,齿面∑(1)和∑(2)的牵连速度分别为(1)、(2),两牵连速度之差称为齿轮副共轭齿面在切触点M处的相对运动速度,即(12)=(1)-(2)=-(21)=-((2)-(1))。若选用如图4-84所示坐标系,且M点的坐标为M(x,y,z),则相对运动速度的坐标式为: 共轭齿面瞬时切触点M处,齿面∑(1)和∑(2)的牵连速度分别为(1)、(2),两牵连速度之差称为齿轮副共轭齿面在切触点M处的相对运动速度,即(12)=(1)-(2)=-(21)=-((2)-(1))。若选用如图4-84所示坐标系,且M点的坐标为M(x,y,z),则相对运动速度的坐标式为:
当∑=90°
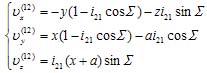
当∑=0
综合相对运动速度
在共轭齿面切触点处,与两曲面相对速度的几何大小相等方向相反的速度,亦即齿面相对运动速度。
卷吸速度
滚动体运转时,将润滑油吸入接触面之间的速度。在数值上等于滚动体的平均圆周速度。设两滚动体的圆周速度分别为v1和v2,则卷吸速度为v=(v1+v2)/2(m/s);若一个滚动体的圆周速度为v1,另一滚动体速度为零,则卷吸速度为v=v1/2(m/s)。
齿轮副的同速点
齿轮副的共轭齿廓,在其相对瞬时回转中心点处啮合时,相对运动速度为零,绝对速度相等。此相对瞬时回转中心(即节点)称为齿轮副的同速点。
界限点处的滑动系数
在齿面∑(1)上的二类界限点处的滑动系数σ1=∞,齿面∑(2)上二界共轭点处σ2=1。齿面∑(2)上一类界限点处σ2=∞,∑(1)上一界共轭处σ1=1。
滑动系数
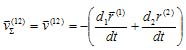
共轭齿面的啮合点P,在齿面上的移动速度分别为d1(1)/dt,d2(2)/dt,经过Δt时间后,在齿面上的移动弧长分别为 Δs1、Δs2(矢量变化为Δ(1)、Δ(2)),则平均滑动量为:

定义平均滑动量的极限,称为滑动系数。
用于平行轴传动的渐开线圆柱齿轮副的滑动系数为:

用于平行轴传动的摆线圆柱齿轮副的滑动系数为:

式中,R为摆线形成圆半径。
 齿条 |
圆柱齿轮 |
圆锥齿轮 |
蜗轮蜗杆 |
非圆齿轮 |
特种齿轮 齿条 |
圆柱齿轮 |
圆锥齿轮 |
蜗轮蜗杆 |
非圆齿轮 |
特种齿轮
首页 |
进口齿条 |
进口齿轮 |
齿轮标准 |
询价必读 |
齿轮知识 |
网站地图
电话:010-6492-5308 | 传真:010-6492-5744 | 邮件:
sales@gearandrack.cn
2003-2012年北京正基元齿轮有限公司版权所有。本网站由北京正基元齿轮有限公司设计、制作、维护。
本网站上的任何内容,未经正基元公司的书面授权,均不得以任何方式复制、转载、或镜像,否则将追究其违权责任。 |